Facebook/
Facebook/
 Twitter/
Twitter/
 RSS
RSS
-
- 09 AprHyperbody's METABODY team collaborates with the TU Delft Robotics Institute to develop the HYPER LOOP
- 26 MarHyperbody's Robotic Building (RB) team hosts Delft Robotics Institute's monthly organised RoboCafé.
- 20 FebHyperbody Guest Researcher Serban Bodea presents the Robotic 3D Printing project at the BEMNext colloquium, CiTG, TUDelft
- 19 FebAchilleas Psyllidis collaborates with the Amsterdam Institute for Advanced Metropolitan Solutions (AMS)
- 09 FebRobotic 3D printing project prototypes will be exhibited and presented at Week van De Bouw (Construction Week) in Utrecht
- 03 FebDr. Nimish Biloria lectures at the Design-Lab, Swedish School of Textiles, University of Boras, Sweden.
- 23 JanFinal Review MSc1&3 Vertical Studio: Continuous Variation (M4H, MerweVierhavens)
- 09 JanAchilleas Psyllidis and Delft Social Data Science Lab researchers present and participate at TU Delft's 173rd anniversary
- 12 DecSina Mostafavi lectures at AA school, Algorithms and Actualization Symposium
- 10 DecFootprint 15 edited by Henriette Bier (TUD) and Terry Knight (MIT) is now available online
-
Author- By: V. Laszlo
- Date
- 12.05.2017
- Keywords
- lecture

-
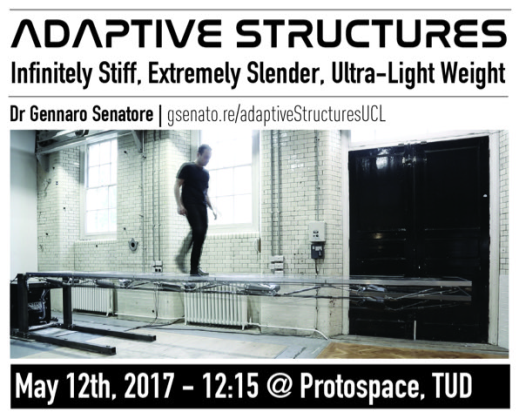
Dr Gennaro Senatore lectures on "Adaptive Structures: Infinitely Stiff, Extremely Slender, Ultra-Light Weight"
-
Dr Gennaro Senatore lectures on "Adaptive Structures: Infinitely Stiff, Extremely Slender, Ultra-Light Weight"
May 12th, 2017 - 12:15 @ Protospace, TUDDesigning structures with minimal environmental impact is now a serious concern in the construction sector. Active control has been used in civil engineering structures for a variety of purposes. The most widespread application so far has been in vibration control. The potential of using adaptation to save material mass has been investigated by some but whether the energy saved by using less material makes up the energy consumed through control and actuation is a question that has so far received little attention.
During this seminar, Dr Gennaro Senatore will present an overview of the formulation of a novel methodology to design adaptive structures. This design method synthesises structural configurations that are optimum hybrids between a passive and a fully active structure to minimise the structure’s whole-life energy comprising an embodied part in the material and an operational part for structural adaptation. Instead of using more material to cope with the effect of loads, here strategically located active elements redirect the load path to homogenise the stresses and keep deflections within limits by changing the shape of the structure. To ensure the embodied energy saved this way is not used up to by actuation, the adaptive solution is designed to cope with ordinary loading events using only passive load bearing capacity whilst relying on active control to deal with larger events that have smaller probability of occurrence. The research to date has demonstrated that up to 70% reduction in whole-life energy was achievable for slender structures. Several case studies will be presented ranging from catenary arch bridges to exoskeleton structures.
Using this method, a large-scale prototype structure was designed in collaboration with Expedition Engineering and built at the UCL Structures Laboratory. The prototype, an ultra-slender 6m (length) x 0.8m (width) x 0.16m (depth) (37.5:1 span to depth) cantilevered truss structure, can change its shape in real-time to maintain serviceability conditions showing zero deflection under loading thus achieving an effective infinite stiffness. The structure is 80% lighter than an equivalent passive one. Experimental results in terms of energy savings confirm the numerical findings obtained via numerical simulations. This prototype structure was exhibited at various key institutions amongst with University College London and the International Association for Shell and Spatial Structures symposium (IASS) held in Amsterdam in 2015. A month solo exhibition took place in in August 2016 at a well-known gallery space called “The Building Centre” situated in central London.
Further information:
gsenato.re/adaptiveStructuresUCL
gsenato.re/adaptiveStructuresExhibitionBC
gsenato.re/adaptiveStructuresBCmoments