 Facebook/
Facebook/
 Twitter/
Twitter/
 RSS
RSS
-
- Scalable Porosity
- Adaptive Environments
- Kite-powered Design-to-Robotic-Production
- Fibrous Smart Material Topologies
- S.M.A.R.T Environments
- Robotic Building
- METABODY
- --- METABODY 1st EVENT
- --- METABODY 2nd EVENT
- --- Hyperbody update 02-2014
- --- Hyperbody Msc2 prototypes
- --- Ambiguous Topology 07-2014
- --- Reflectego & RoboZoo 07-2014
- --- The Hyper-loop
- --- Nervion, Textrinium & [S]caring-ami 07-2015
- SynSerre
- Robotic Architecture
- Automotive Complex
- Space-Customizer
- InteractiveWall
- iLITE
- Manhal Oasis Masterplan
- Muscle NSA
- protoCITY 2005+
- Virtual Operation Room
- Digital Pavilion
-
-

- 1:1 prototype showing interactive skin components developed by V. Ondejcik within Hyperbody 's graduation lab tutored by H. Bier, N. Biloria, M. Sobota and L. Lignarolo (2012)
-
- Projects
- Robotic Building
- year
- 2014-2018
- Project leader
- Henriette Bier
- Project team
- Henriette Bier, Sina Mostafavi, Ana Anton, Serban Bodea
- Collaborators / Partners
- 3TU Bouw, Delft Robotics Institute (DRI), 100% Research TUD, ABB, and KUKA
- Advisory board
- Kas Oosterhuis (VAA.ONL), Keith Green (Archibots), Holger Schnadelbach (Mixed Reality Laboratory)
- Links
-
Scalable Porosity (2014)
Performative Hybridity (2015)
InDeSem 2015 ReCraft
Continuous Variation (2015)
D2RP Workshop (2015)
D2RP Exhibition(2015)
-
-
This is an archived website and is not updated anymore.
The Robotic Building website is available here: http://www.roboticbuilding.eu/
ROBOTIC BUILDING (RB)
Robotic building implies both (A) physically built robotically augmented environments and (B) robotically supported building processes, whereas reconfigurable, robotic environments incorporating sensor- actuator mechanisms that enable buildings to inter-act with their users and surroundings in real-time may require design to production, assembly, and operation chains that may be (in part or as whole) implemented by robotic means.Movie 1: Reconfigurable apartment developed by Hyperbody with MSc 2 students and industry partners (Pop-up Apartment, 2013)
(A) Robotic buildings are physically built environments consisting of building components with embedded robotic devices. Such robotic building components exhibit behaviors that follow simple rules in order to satisfy structural, climatic, or spatial requirements and build collectively a dynamic, intelligent environment. For that purpose, components are tagged and incorporate information regarding inter al. their design, structure, materialization, production, assembly, and operation. Furthermore, they are equipped with sensors and actuators that enable them to not only perceive but also act on their surrounding environment. This ability to act may imply physical such as geometrical, material, or sensorial transformation and reconfiguration.
(B) Robotically supported building processes, focus on processes only, namely on, seamless, computer-numerically controlled (CNC) and robotically supported design to production and operation processes enabling implementation of buildings from con-ceptualisation to use. Such processes may require modelling, simulation, and produc-tion environments facilitating collaboration and exchange not only between humans but also between robots and humans.
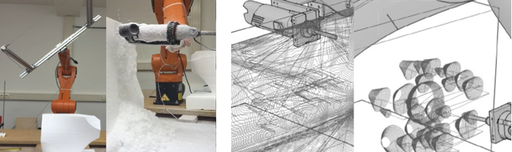
This research aims to indicate necessary steps to be taken in order to establish CNC and more specifically robotically supported, seamless architectural design to pro-duction and use processes. The assumption is that such processes require simulation and testing at 1:1 scale in a design to operation robotic laboratory with a mobile, flexible, and extendable configuration allowing for a range of different architectural design to production experiments at 1:1 scale to be implemented.Movie 2: Wire cutting robotic fabrication of 1:1 prototype implemented with ABB robots at Hyperbody (Feringa et al., 2012)
Several groups within EU and US are currently exploring architectural robotics and robotic production by means of sensor-actuator technologies as well as robotically supported fabrication and assembly but no integral approach has been yet conceived or drafted. An integral approach implies that architectural design to production and opera-tion chains require all systems from structure to climate control, furnishings, appliances, and equipment to be considered. This research aims, therefore, to establish a novel CNC and robotically supported design to operation process that takes all phases from design to operation into account. The assumption that such processes enable en-ergy- and material- efficient, customized, multi-material, free-formed, diverse, and opti-mized building, will be tested and presumably validated by (1) developing a design to operation framework for on-site human robot collaboration, and (2) robotically building a 1:1 small volume multi-functional, hybrid architectural structure.
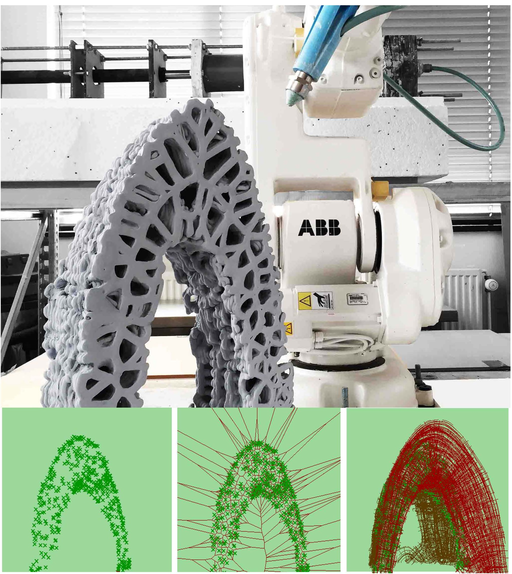
Movie 3: Robotic additive manufacturing explored with ABB demo-robot within the Scalable Porosity workshopThe workshop Scalable Porosity (2014) focused on developing design to production methods for introducing porosities at different scales, ranging from micro levels, as material systems, to macro levels as spatial and architectural configurations. The aim was to develop material patterns that by additive layering will generate variable porosities. In principle, these patterns may address a range of scales, where voids may vary in ranges of, to the building scale, where voids may vary in ranges of meter, indicating inhabitable spaces. Due to production process constraints within this exercise, the focus has been on porosity ranges from millimetres to centimetres achieved by means of robotic material deposition.
- Figure 1: Fragment of urban furniture (1:1 scale) structurally optimized and robotically 3D printed at Hyperbody (2015)
The MSc 2 studio Continuous Variation (2015) focused on developing a series of purposeful, performative and informed Design-to-Robotic-Production (D2RP) processes that were designed and tested by developing a one-to-one building prototype. The prototype was part of the design project (http://re.hyperbody.nl/index.php/Msc2RDP:frontpage) for a student-housing cluster.
In order to develop a coherent D2RP system specific to each project, the first step was to implement methods for form finding derived from the innate characteristics of the materials. This part of the design was implemented as a parametric strategy to define the porosity at architectural (macro) scale to fulfill functional and formal requirements. Furthermore, in order to achieve the material (micro) porosity level, a finite element method for material distribution optimization was implemented on fragments of the designed structures. The optimization also considered local and global load and support conditions.

- Figure 2: Subtractive D2RP material, component, and building scale explorations
The structural optimization routines enabled mapping stress lines and point cloud on the macro geometry, which allowed generation of structurally informed porous patterns. This implied that porosity at macro, meso, and micro scale were implemented by mapping light, ventilation, and structural needs onto the geometry.
- Figure 3: Volumetric wire cutting and milling (with linear and circular paths) for subtractive D2RP
Robotic prototyping established a link to building at 1:1 scale as it involved design, realization, and testing at building scale. By exposing ranges for feasibility in design, fabrication, and exploitation, a rapid-prototyping approach is important for avoiding failure and foreseeing D2P opportunities and threats. Furthermore, the actual integration between digital and material processes enables D2RP to bridge small and large scale.
D2RP takes the inherent multifaceted nature of buildings into consideration from the early design to the latest building operation phase. The ultimate goal is to implement chained D2RP processes in which robots take specific roles while all (human and non-human) members of the setup as well as the respective design systems receive feedback at all time.
In this context, both robotic additive and subtractive techniques are relevant and need to be integrated into D2P processes. While additive techniques may be slower, they have the advantage of enabling generation of highly customized material architectures. Subtractive techniques such as volumetric wire cutting and milling prove to be easier to control as material behavior is more predictable and less dependent on environmental conditions. A combination of both is envisioned to push D2RP to the next level, which aims at development of multi-material, -techniques, and -robots approaches. These transform building construction at the level where product-data descriptions drive NC and robotic manufacturing operations and processes. Such processes for the manufacturing of customized building components combine materialization techniques aimed at optimizing structural and climate control requirements as well as improving material and production efficiency. In this context, structural optimization is not anymore a post-optimization routine, but a design driver.

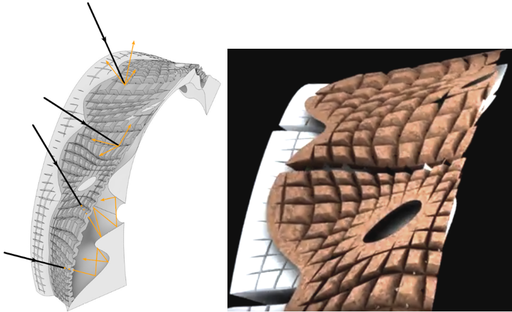
- Figure 4: Robotic 3D milling of components exhibiting geometries and porosity patterns that are informed by structural and climate control requirements
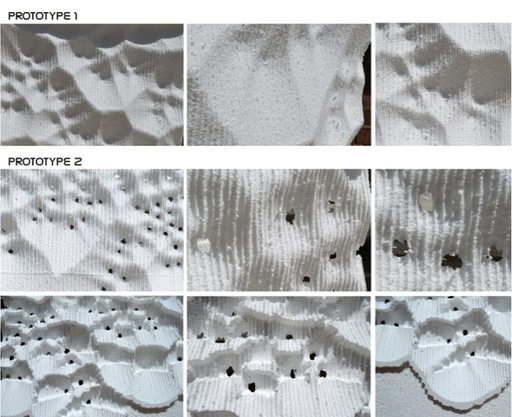
- Figure 5: Subtractive D2RP prototypes exhibiting patterns and degrees of porosity associated to spatial, structural, and climate control requirements
Project results have been presented and exhibited at the V2 gallery in Rotterdam, at Écoles supérieures des beaux-arts de Tour in Angers and Le Mans, and 3 TU events in Netherlands.
Project team consisted of Henriette Bier, Sina Mostafavi, Ana Anton, Serban Bodea, Matteo Baldasari, MSc. 2 Students ( Robotic Environments, D2RP, 2015)
The workshop Performative Hybridity (2015) explored hybridity that is emerging from the combination of multiple materials and systems with various performances. Hybridity was investigated at architectural, building component and material scale in relation to multiple materials and systems that have various performances. Performances addressed functional, formal, material aspects, etc., while changes in performativity requirements addressed, for instance, inside-outside transitions and implied porosity change or some other material or immaterial transformation. Performance parameters (related to functional, structural, and/or environmental requirements) that vary in time and are drivers for the design of passive, active, and interactive building components.

- Figure 6: Design-to-Robotic-Production loop implemented in Performative Hybridity workshop (2015)
Topological Assemblage has been explored in 2016 by designing and robotically producing a three-dimensional structure that consist of various components assembled into an integral whole. The structure as part of a podium/stage was designed by taking into consideration requirements with respect to function/use, form, structure, and climate as follows:
(1) Functional requirements were addressed by mapping 24/7 activities;
(2) Formal aspects were explored by taking into consideration material, structural, climatic requirements as well as principles of customisation, continuous variation, and componential re/combination;
(3) Climatic/environmental requirements were considered from a distributed passive-active control perspective.Main consideration was that the structure is composed of components that are together establishing hybrid systems (programmatic, climatic, structural, etc.), which are in part or completely NC or robotically processed and operated. Porosity and variation were investigated in relation to performative aspects (addressing functional, structural, and/or environmental needs).
- Figure 7: Multi-material compounds facilitating multiple functional requirements for improved structural behaviour, acoustics, and physical comfort, etc.
The goal to develop a stage that improves the acoustic quality for lectures has been achieved as follows: On architectural, functional, and acoustic level the stage enables the connection between lecturers and audience. The stage is an optimized shell structure with sound absorptive capacities, which was developed for Hyperbody's GSM #3 symposium in the Orange hall of the Architecture Faculty at TU Delft. The stage is transforming, combining, and integrating materials, a mix of solid and plate materials by means of robotic manufacturing.
Movie 5: Impression of the complete stage/podium for the GSM #3 Symposium from which a fragment has been robotically produced (2016)
Robotic Building (RB) is a Hyperbody project building up on 10 years of expertise in Non-standard and Interactive Architecture (NS&IA). It has been supported by 3TU, Delft Robotics Institute (DRI), 100% Research, and ABB. Directors and project leaders of NS&IA (2002-15) are K. Oosterhuis, H. Bier, and N. Biloria. Teams of presented projects (2009-15) are J. Feringa, M. Rippmann, S. Oesterle and MSc2 students (Vault 2012); N. Biloria, H. Bier, J. Chang, C. Friedrich, MSc 2 Students (MultiMod, 2013); H. Bier, S. Mostafavi, A. Anton, S. Bodea, and MSc 3 Students (Scalable Porosity 2014); Henriette Bier, Sina Mostafavi, Ana Anton, Serban Bodea, and MSc 3 students (Performative Hybridity, 2015); Henriette Bier, Sina Mostafavi, Ana Anton, and MSc 2 students (Topological Assemblage, 2016).






