Facebook/
Facebook/
 Twitter/
Twitter/
 RSS
RSS
-
- 02 JulRobotically-driven Building initiated by Dr.-Ing. Henriette Bier has received funding from 3TU.Bouw and will be implemented in collaboration with CITG-TUD, TUE, ONL and Mebin
- 02 JulAchilleas Psyllidis is presenting at the 10th IEEE International Conference on Intelligent Environments (IE'14)
- 27 JunFinal presentation: MSc2 Inter-performing environments Design studio
- 12 JunAchilleas Psyllidis is guest lecturer at Second Nature summer school
- 03 JunLecture Urban Informatics: Promises and Potentials by Achilleas Psyllidis
- 28 MayLecture: Architecture of Change by Branko Kolarevic in protoSPACE
- 28 MayInter-performing environments: update on Hyperbody MSc2 prototypes for the EU culture program Metabody
- 19 MayDr. Nimish Biloria appointed as Doctoral defence committee member at Ècole nationale supèrieure d'architecture Paris-Malaquais
- 14 MayDr. Nimish Biloria appointed as Scientific Committee member at the ICONARCH II, Innovative approaches in Architecture and Planning, Konya, Turkey
- 29 AprAchilleas Psyllidis's paper is accepted for the 10th IEEE International Conference on Intelligent Environments (IE'14)
-
Author- By: R. Cloot
- Date
- 16.09.2016
- Keywords
- exhibition
-
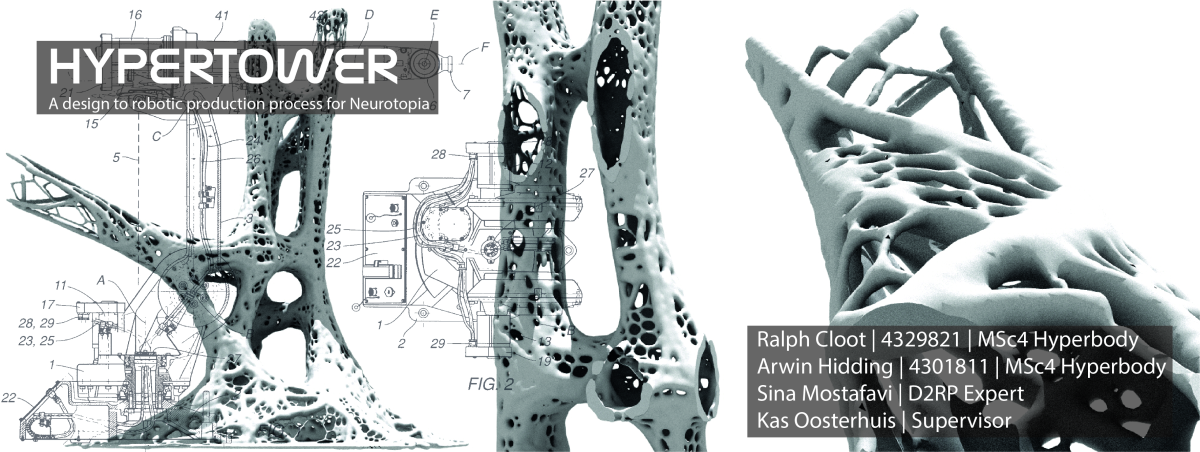
Hyperbody graduate students Ralph Cloot and Arwin Hidding in collaboration with Sina Mostafavi and supervised by Kas Oosterhuis design a building for Neurotopia
-
Hyperbody graduate students Ralph Cloot and Arwin Hidding in collaboration with Sina Mostafavi and supervised by Kas Oosterhuis design a building for Neurotopia
For the last ten years, Erik Sep has been working at his expanding miniature city called Neurotopia. An ever growing city where he continuously collects, builds, demolishes and reorganizes. For one of his vacant plots within the city, the Hyperbody graduate students Ralph Cloot and Arwin Hidding where invited to design a building that reacts to the surrounding structures using design-to-robotic-production methods, in collaboration with Sina Mostafavi and supervised by Kas Oosterhuis.
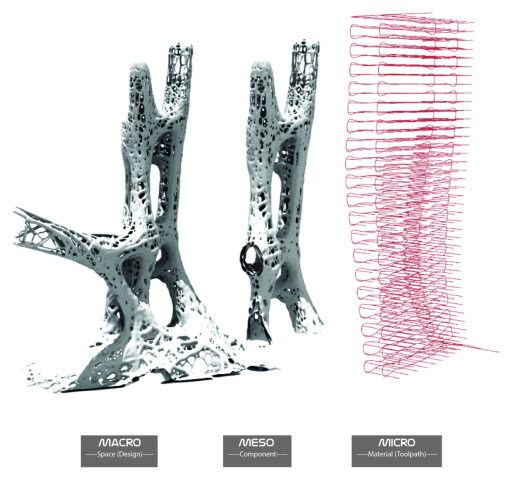
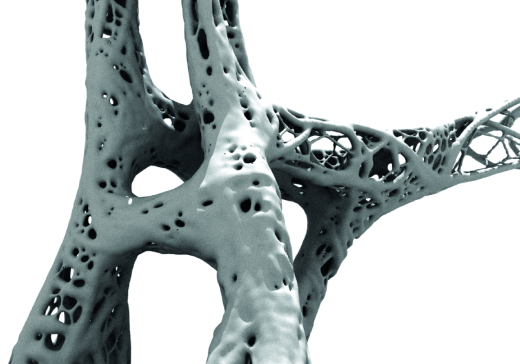
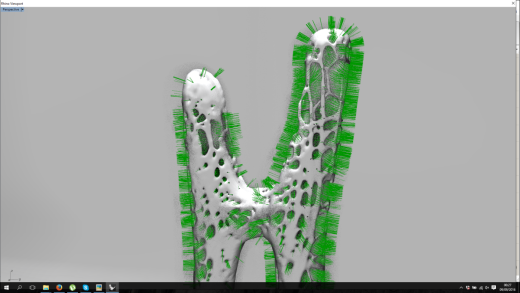
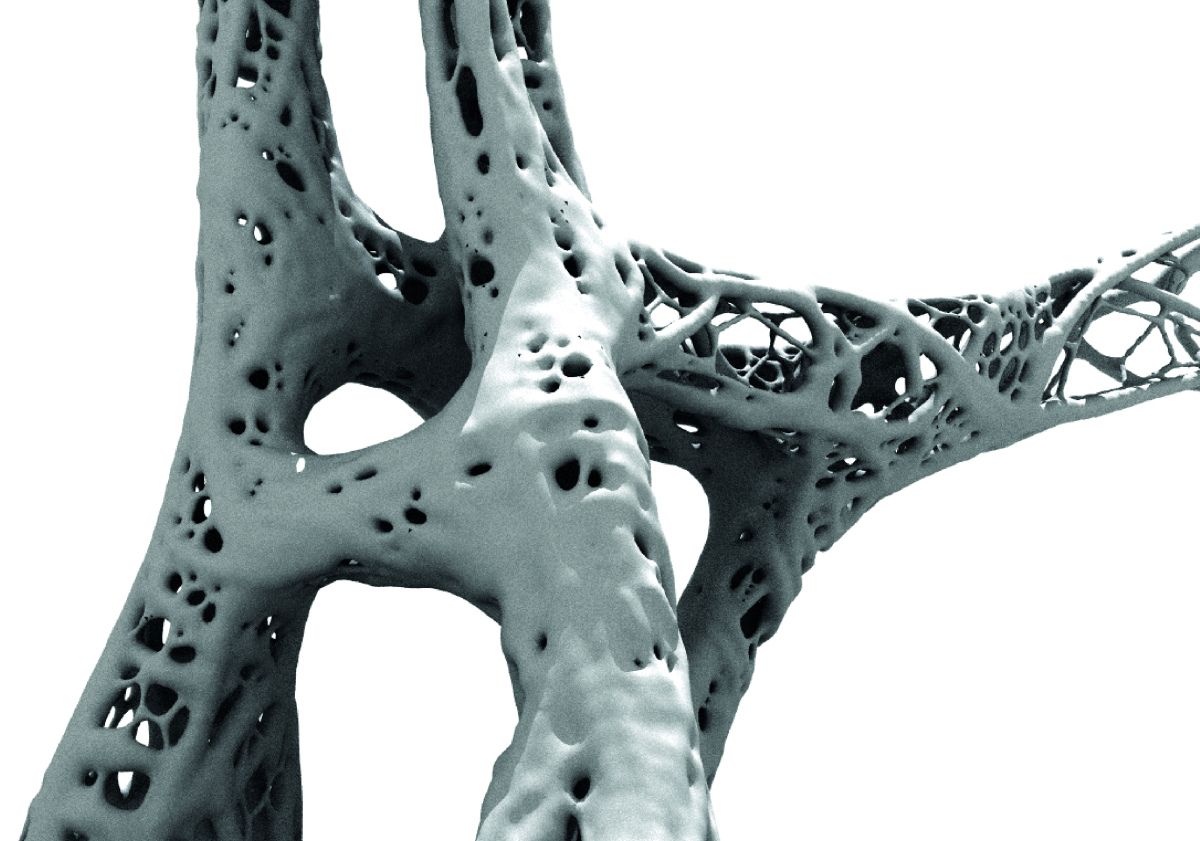
In order to create a reaction towards the existing conditions on the site, we simulated function placements and people flows using processing. From this abstraction of the building we were able to shape the macro-scale (space-scale). A custom made algorithm was applied afterwards that takes into account a stress, curvature and solar radiation analysis in order to materialise the meso-scale (component-scale). As an architectural input we wanted to achieve a gradual transition between the structure, the closed segments (0% porosity), the openings (100% porosity) and the ornaments. The entire piece was divided into five EPS components, each of these were milled out using a Kuka industrial 6-axis robotic arm. The micro-scale (material-scale) of the project was made up of three different material removal fases, gradually creating more detail the closer the robot came to the object within the EPS.
The finished work is displayed at the opening of Neurotopia's exhibition at Galerie Frank Taal in Rotterdam on september the 16th, 2016.
http://www.franktaal.nl/actueel/show/erik_sep___neurotopia_in_de_van_speyk_nr__192.html
http://www.neurotopia.nl/