 Facebook/
Facebook/
 Twitter/
Twitter/
 RSS
RSS
-
- Scalable Porosity
- Adaptive Environments
- Kite-powered Design-to-Robotic-Production
- Fibrous Smart Material Topologies
- S.M.A.R.T Environments
- Robotic Building
- METABODY
- --- METABODY 1st EVENT
- --- METABODY 2nd EVENT
- --- Hyperbody update 02-2014
- --- Hyperbody Msc2 prototypes
- --- Ambiguous Topology 07-2014
- --- Reflectego & RoboZoo 07-2014
- --- The Hyper-loop
- --- Nervion, Textrinium & [S]caring-ami 07-2015
- SynSerre
- Robotic Architecture
- Automotive Complex
- Space-Customizer
- InteractiveWall
- iLITE
- Manhal Oasis Masterplan
- Muscle NSA
- protoCITY 2005+
- Virtual Operation Room
- Digital Pavilion
-
-
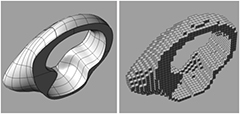
- 3D model NURBS and Voxelized geometric representations
-
- Projects
- Space-Customizer
- year
- 2004-2008
- Project leader
- Henriette Bier
- Project team
- MSc students (TUD and RAFAA)
- Collaborators
- K. de Bodt (RAFAA), R. Schmehl (TUD)
- Advisory board
- Kas Oosterhuis (TUD), Terry Knight (MIT)
-
-
SPACE-CUSTOMIZER
Founded on the imperative to understand, evaluate and consciously decide about the use of digital media in architecture this research not only aims to analyse and critically assess computer-based systems in architecture, but also proposes evaluation and classification of digitally- driven architecture through procedural- and object-oriented studies.
It, furthermore, introduces methodologies of digital design, which incorporate intelligent computer-based systems proposing development of prototypical tools to support the design process.
This research attempts to answer questions regarding how aspects of intelligence are incorporated in design systems and how these influence the design process and the design: Generative Design, for instance, has been focus of current design research and practice largely due to the phenomenon of emergence explored within self-organizing systems, generative grammars and evolutionary techniques.
In this context, system-embedded intelligence has often been reduced to the mechanics of working with these systems. This research, in response, not only critically reveals what these techniques offer architectural design, but also addresses challenges in their application and development.
Movie 1: 3D model Mesh and Voxelized geometric representations
Space-Customizer (SC) incorporates three sub-tools Space-Generator (SG), Space-Interactivator (SI), and Function-Layouter (FL), which incorporate sub-tools such as Space-Adjuster (SA), which in turn incorporate sub-tools such as Geometry-Triangulator (GT), GeometryVoxelizer (GV), etc.
Automated Reasoning as employed in SC-FL is, basically, logical reasoning, not common-sense or probabilistic reasoning since acceptable conclusions follow logically from the supplied facts such as 3Dspace geometry, functional objects descriptions and rules for their positioning in the 3D-space.
For instance, optimization such as occupancy maximization is implemented in MiniSAT+ with a goal function, which finds a solution and takes the occupancy of that as a base value. It adds then an inequality stating that the occupancy must be larger than that for the next run and continues to run until no solution is found (Bier et al., 2007).
Since FL is able to find if an assignment is possible or not, its search is complete.
With respect to incorporated aspects of intelligence, FL employs SATsolving techniques based on an improved DPLL search algorithm: While the search goes systematically through all instances, intelligent search mechanisms such as non-chronological backtracking and constrain learning are employed. The first one is a backtracking technique (inter al. Zhong P. et al., 1998) which increases search efficiency by jumping up - instead of one as backtracking does - more then one level in the search tree, while the second one is a technique for improving efficiency by recording and storing constraints whenever an inconsistency is found.
The developed prototypical tools generate spatial prototypes such as Motion, Mass, Functional, and Interactive Spaces and have been implemented with contributors from TUD, RTU, and RAFAA.Movie 2: Space-Customizer code for generating required volumes
